2023. 2. 23. 17:51ㆍDevcorse/Visual SLAM(02.20~3.31)
Abstract
feature points는 real-time frame-rate를 필요로 하기에 high-spped feature detector는 필수적이다.
SIFT, Harris,SUSAN은 성능 측면에서 좋은 method이지만, 계산량이 real-time에 적용하기에 너무 많다.
machine learning은 feature detector에 도움을 줄 수 있으며 이 방식은 Harris detector(120%), SIFT(300%)보다 빠르다.
당연히 좋은 성능이 반영되야하며 이는 동일 image에서 동일 3d location을 나타낼수 있어야한다.
Introduction
corner detection은 trakcing, SLAM에서 많이 사용된다. live video에서 full frame을 사용하면 시간을 너무 많이 사용한다.
이를 해결하기위해 machin learning 알고리즘을 사용했다.
Previous work
이미지에서 코너를 계산할때, pixel은 threshold cornerness value를 넘어야 corner로 인정한다.
moravec은 patch 주변 후보 corner와 patch의 작은 방향 변화에 대한 sum-of-squared-differences(SSD)을 계산한다.
Harris는 Hessian metrix의 approximation을 계산한다.(^는 이미지 patch에대한 평균, smooth circular)

GoodFeatures에서는 H에서 작은 eigen value를 써야한다고 말한다.

SIFT는 scale invariance을 gaussian kernel의 sigma값을 다르게 주어 DoG를 통해 얻는다.
우리는 속도를 보다 더 빨리하기 위해 Laplacian of a Gaussian(LoG)를 사용했다.(성능은 비슷)
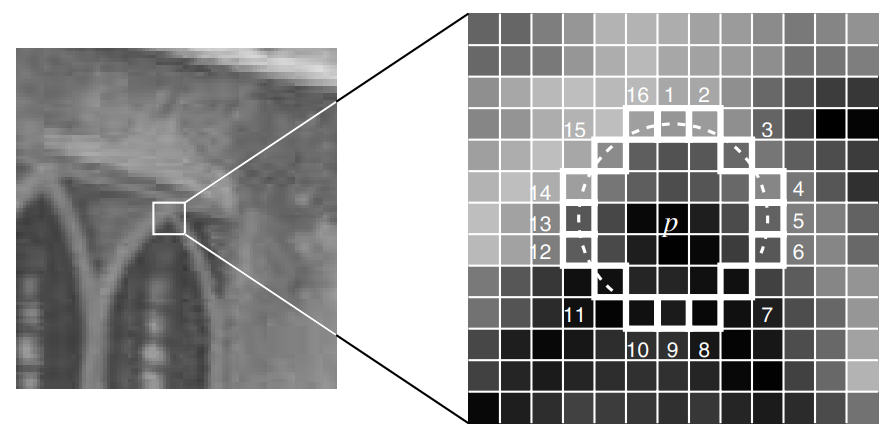
이미지 처럼 pixcel 주변연속된 n개가 나머지 16-n개와 어느정도 차이가 있는지로 corner 판단한다.
High-speed corner detection
FAST: Features from Accelerated Segment Test
O: 주변 연속된 n개의 픽셀이 Ip와의 차이가 threshold 보다 크면 corner로 판단한다.
N: 여기에 machine learning기법은 먼저 1,5,9,13 4개만 비교하여 corner가 될 후보군이 될지 판단한다.
4개중 3개가 연속하고 ip와의 차이가 threshold보다 작으면 corner가 아니다.
-> 엄청난 속도 증가 효과가 있다.
역시나 문제점 또한있다.
1. n<12작을때 잘 작동하지 않는다.
2. 사람이 정한 데이터에서의 후보군이 실제 데이터의 특징의 분포와 다를 수 있다.
3. N방법에서 계산한 값을 O에서 재사용할 수 없다.
4. 인접한 pixcel에서도 corner가 검출될수 있다.
Machine learning a corner detector
16개의 주변 픽셀x는 Ip의 차이로 darker, similar, brighter인 p로 구분 된다.
이 p가 진짜 corner인지 미리 labeling을 하고 이를 Kp라고 한다.
이 Kp의 수로 확률을 만들고 이 확률을 토대로 학습을 진행한다.
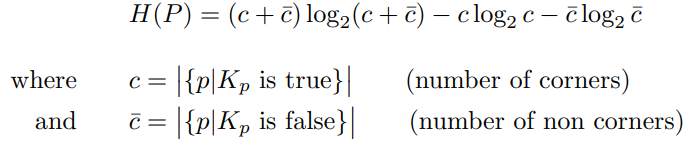
학습 결과로 decision tree가 나와 속도가 굉장히 빠르다.
Non-maximal suppression
feature에대해 score를 계산하고 가장 높은 score를 가진 feature만 V로 남긴다.

Time results
기존의 FAST보다 빠르다.

Conclusions
장: 엄청빠르다, 반복했을떄 재현성이 좋으며 다른 각도에서도 변화가 적다.
단: Fast는 high level Noise가 있을때 정확도가 robust하지 않다.
-> 속도빠른걸로 여러 프레임을 sampling하여 커버치겠다고 하는데 커버가 되는지는 모르겠다.
line의 width 가 1pixel일때 간혹 corner로 오판한다.
threshold에 따라 성능이 갈린다.
'Devcorse > Visual SLAM(02.20~3.31)' 카테고리의 다른 글
| ORB paper (0) | 2023.02.23 |
|---|---|
| BRIEF paper (0) | 2023.02.23 |
| Harris Corner paper (0) | 2023.02.23 |
| Feature detector (0) | 2023.02.23 |
| 카메라 센서 구조 및 좋은 카메라 고르기 (0) | 2023.02.22 |